)
Glossary
An evolving glossary of terms relevant to GAGE and the GNSS/GPS geodetic community
If you don't find the term you need explained or see an error, Contact Us.
0-9
4-character ID: four printable ASCII characters (usually case-insensitive alphanumeric plus underscore) which traditionally have been used to designate a monument or site, so with a-z, 0-9, and _ (underscore) there are 37^4 = 1874161 unique 4-character IDs possible; see also
in the best documented cases, the monument code, visit code, and raw file code are identical, though in some cases the documentation (forms, etc.) and the raw data files may indicate different 4-character IDs even though all information is for the same survey point of a monument
A
ALS: "Airborne Laser Scanning"; a lidar system installed in an aircraft that scans ground targets in a swath beneath the airborne aircraft; see National Center for Airborne Laser Mapping - NCALM
ANET: "Antarctic NETwork"; network of GNSS stations in or near Antarctica; see also POLENET
antenna: (for the GNSS community:) a resonant device that detects the GHz GNSS (GPS, GLONASS, Beidou/Compass, Galileo, QZSS, IRNSS, or SBAS) microwave signals and converts them to electrical signals for processing by a GNSS receiver; see also text documentation:
and other:
- GPS antenna calibrations by the staff of the Instrumentation and Methodologies Branch, Geodetic Services Division, National Geodetic Survey, NOAA, Dept. of Commerce
for more information
antenna cable: a 50-ohm impedence, RF-shielded, co-axial cable used to connect the antenna to the receiver
antenna dome or antenna radome: a thin, almost microwave-transparent material placed over a GNSS antenna, often in the shape (or nearly so) of a simple geometrical surface (e.g. hemisphere, cone, paraboloid, etc.) used within the geodetic community to protect GNSS/GPS antennas at permanent sites from snow, debris accumulation, and vandalism. It was designed to have uniform thickness, minimizing its impact on the electrical phase center of the associated antenna; use of an antenna dome slightly alters the effective phase center(s) of the antenna for high-precision geodetic positioning due the dielectric contact of the dome and the dome's geometry relative to the true phase centers of the antenna, thus requiring the exact type of dome used to be known (see dome designations at end of IGS Central Bureau receiver & antenna table)
antenna height: vertical distance from the survey point of a monument to the antenna reference point (ARP) of the antenna; this may be calculated using the geometry of the antenna and the antenna slant height
antenna orientation: the antenna is usually rotated into a standard orientation, often so that the antenna cable connector is toward geographic north, though often in the field only the local magnetic north direction is known, requiring the local magnetic declination to be known
antenna reference point: or ARP; an established point on the antenna choke ring, ground plane, or base from which the phase centers of the GNSS carrier waves are measured (e.g. L1, L2, and L5 for Navstar GPS); for specific antenna geometries, see also text documentation:
ANTEX: "Antenna Exchange"; ASCII exchange representation used to distribute antenna calibration values, including the IGS sign convention for PCOs and PCVs; see also
Archive Database: a relational database management system (RBDMS) used by the UNAVCO Data Group to track and retrieve archived GNSS data files and metadata; uses an Oracle engine
Archive process: the steps undertaken to archive GNSS data, logs, and/or other forms at the UNAVCO Archive, which roughly are:
- taking receipt of incoming data and or logs, whether by physical media or by electronic transfer and this receipt entered in the Archive Database; the physical media (or tape copies for electronic transfers) are stored in the Physical Repository; this step is referred to as data/log check-in;
- extracting metadata about the received data files and entering this information into the Archive Database; the data files are compressed and copied into the On-line Repository; the data files handled in this way can be raw data or RINEX or some combination of the two (though a copy of the raw data is always desired at a minimum); this step is referred to as data injection;
- the visit metadata is extracted from the logs and entered into the Archive Database;
- and finally the visits are associated with the injected data, often requiring a reexamination of the metadata of the visits and of the data in order to resolve discrepancies; this step is referred to as validation
although the exact steps vary on a case by case basis
ARGO: "Automated Reformatter of GPS Observations"; both the software and the resulting fixed-format ASCII exchange representation of GPS data and metadata; created and made available by the National Geodetic Survey, U.S. Department of Commerce, ARGO is similar to and the immediate predecessor of the RINEX format
B
BARD: "Bay Area Regional Deformation" Northern California Continuous GPS Network; see also BARD homepage
BARGEN: "Basin And Range Geodetic Network"; early set of GPS permanent stations in the Basin and Range of the western U.S. co-developed and installed by UNAVCO; see also BARGEN
BDS-SIS-ICD: "BeiDou System Signal In Space Interface Control Document"; see:
- OSS B2a (version 1.0) (Dec 2017)
- OSS B1C and B2a (test version) (Aug 2017)
- OSS (version 2.0) (Dec 2013)
- OSS B1I (version 1.0) (Dec 2012)
BDT: "BeiDou Time"; analogous to GPS time, the time in seconds, skipping UTC leap seconds, since 1.0 Jan 2006 UTC — therefore an offset from GPST of 1356 weeks of exactly 604800 seconds each plus the 14 seconds inserted into UTC between the start of GPST, 6.0 Jan 1980 UTC, and BDT start epoch on Sunday 00:00 1 Jan 2006 UTC (= 1.0 Jan 2006 UTC)
Beidou-1 Navigation System: a specific spaceborne radionavigation system financed and to be operated by the People's Republic of China, Phase I, consisting of three validation GEO satellites; Phase I launches (all dates UTC):
- BD-1A (GEO) on 30 Oct 2000
- BD-1B (GEO) on 20 Dec 2000
- BD-1C (GEO) on 24 May 2003
- BD-1D on 2 Feb 2007 UTC
(see Encyclopedia Astronautica: Beidou)
Beidou-2 Navigation System — also known as Compass: a specific spaceborne radionavigation system financed and to be operated by the People's Republic of China to be completed in two phases: Phase II (planned to be completed by 2012) to consist of 14 satellites: 5 of which will be in GEO orbits, 5 in IGSO orbits, and 4 in MEO — broadcasting 5 signals; Phase III (planned to be completed by 2020) to consist of 35 satellites: 5 of which will be GEO, 3 in inclined geosynchronous orbit (IGSO), and 27 in MEO — broadcasting 10 signals, the range code numbers being:
- 1-5 for GEO
- 6-37 for MEO/IGSO
In both phases the MEO SVs are arranged in three orbital planes with inclinations of about 55-56° approximately 21540 km above the Earth (orbital period of 12h 53m, or 13 orbits every 7 sidereal days). All SVs use code division multiple access with right-hand circularly polarized carrier frequencies at:
Phase II:
- B1/E2 = 1561.098 MHz
- B3/E6 = 1268.520 MHz
- B2/E5b = 1207.140 MHz
Phase III:
- B1C/L1 = 1575.420 MHz
- B3/E6 = 1268.520 MHz
- B2a/L5 = 1176.450 MHz
Beidou-2 currently uses BDT (Beidou/Compass Time) as the time standard and CGCS2000 as the spatial geodetic reference frame. Originally planned as a purely military system, China announced on 2 Nov 2006 that in 2008 a free open service would allow civilian use with position accuracy of 10 meters, clock synchronization to an accuracy of 50 ns, and speeds to within 0.2 m/s. For launches, see GNSS Modernization: Beidou/Compass; see also BDS-SIS Interface Control Documents; see also
- Inside GNSS, News Update Sept/Oct 2008
- Inside GNSS News, 10 Aug 2009
- Inside GNSS News, 2 Mar 2011
- Encyclopedia Astronautica: Beidou
BINEX: "Bininary Exchange"; binary exchange representation of GNSS data and metadata which allows for encapsulation all or most of the information currently exchanged with the ASCII RINEX format and could easily be extended to encapsulate the ASCII formats of SINEX, IONEX, SP3, and so on; see also BINEX homepage
BOC: "Binary Offset Carrier"; one of several digitial modulation schemes that allows binary data to be imprinted on a reference signal such as a GNSS carrier wave; BOC modulation has low spectral energy at the carrier frequency with spectral energy lobes around it; compare with phase-shift keying (PSK) modulation; see more at Wikipedia: Binary Offset Carrier
BSM: "Borehole Strainmeter"; see Borehole Strainmeters
C
calendar: calendars from 1980 - 2029 showing the day-of-year (ordinal date) and GPS week. On each calendar for each week, the day-of-year is on the left in square brackets [ddd] for the first day of the given week and month, and the GPS week in on the right in pointy brackets <wwww>
1980 1981 1982 1983 1984 1985 1986 1987 1988 1989
1990 1991 1992 1993 1994 1995 1996 1997 1998 1999
2000 2001 2002 2003 2004 2005 2006 2007 2008 2009
campaign: a well-defined number of visits to a group of geographically- or scientifically-related monuments over a well-defined time interval, typically several months in length
campaign data: data from one or more sites from a campaign
carrier frequency: for GNSS signals, the center frequency of a GNSS electromagnetic carrier wave in GHz frequency range with digital modulation (using e.g. phase-shift keying (PSK), binary offset carrier (BOC)); see GPS, GLONASS, Beidou/Compass, Galileo, QZSS, IRNSS, and SBAS for the specific carrier frequencies for the constellation
carrier phase: or carrier phase measurement; ideally, the number of cycles of the carrier frequency of a specific GNSS signal between the phase center of the GNSS SV and the phase center of the user's antenna, although in practice this measurement is unknown to a biased offset of cycles and this bias changes whenever the user's receiver loses phase lock on the GNSS carrier frequency
carrier wave: the actual electromagnetic wave at a specific carrier frequency; for the typical GNSS signal, the carrier wave is right-handed circularly polarized in the GHz microwave range
CBIS: "Central Bureau Information System" of the IGS
CDDIS: "Crustal Dynamics Data Information System" of NASA; see also CDDIS homepage
CDMA: "Code Division Multiple Access"; a data transfer method by which several channels of information can be sent simultaneously over the same carrier wave; see more at Wikipedia: Code division multiple access
CGCS2000: "China Geodetic Coordinate System 2000"; spatial reference system of Beidou-1 and Beidou-2; consistent with ITRF
choke ring: concentric rings of metal around and below the ground plane of the antenna, perhaps separated by microwave-absorbing foam, for the purpose of reducing multipath effects produced by the local geometry of the antenna relative to the site
COCONet: "Continuously Operating Caribbean GPS Observational Network"; network of GNSS stations in multiple Caribbean and Caribbean bordering nations; see COCONet at UNAVCO and COCONet homepage
code: a digital modulation (using e.g. phase-shift keying (PSK), binary offset carrier (BOC)) on the monochromatic carrier wave; for example, traditional GPS uses a Coarse Acquisition (C/A) code and a Precise (P) code and later generation GPS SVs also include a separate Military (M) code and Civilian (C) code, though not necessarily all codes on each carrier wave
Compass: see Beidou-2
continuous data: data from a continuous site
continuous monitoring: round-the-clock receiver collection of data at a setup/station, probably at a regular sampling interval
continuous site: a site at which continuous monitoring is occurring for one or more monuments
continuous station: one permanent station at a continuous site
contract: the legal agreement to fund a project
Coordinated Universal Time: see UTC
CORS: "Continuously Operating Reference Station"; network of NOAA's National Geodetic Survey; see also CORS homepage and CORS Station Guidelines
country: in our database, a geo-political region, e.g. Antarctica, Chile, Russia, USA, etc.
D
data: (one of several possible meanings depending on context)
- information that can be used to reconstruct GNSS observables or a representation of the observables themselves produced by a GNSS receiver, otherwise known as "observation data";
- observation data plus any of a variety of related ancillary data collected by a GNSS receiver, e.g. navigation data (SV-broadcast orbit information), meteorological or other geophysical data (collected at the site and input to the receiver, such as air temperature, air pressure, air relative humidity, earth tilt, earth strain, etc.);
- any output from a GNSS receiver, especially raw data;
- any format in addition to raw data which endeavors to preserve the information content of raw data from a GNSS receiver necessary for processing, e.g. FICA, ARGO, RINEX, BINEX
data file: (a bit of a misnomer since:) persistent storage on media of at least GNSS data (observation data, navigation data, associated meteorological data, and/or other possible data types), and usually also associated metadata, where the data is generally grouped into a time window for a specific antenna/receiver combination for a specific survey point; e.g. a typical raw data file or RINEX fileor BINEX file; the metadata in a data file is always treated as suspect until verified by information on a log
data format: data recorded in one of a number of manufacturers' raw data specifications, or in BINEX, RINEX, RTCM 2.3 or 3.0, ARGO, FICA, or one of a number of other possible specifications
data-logging: data from a GNSS receiver is streamed in near real-time, usually via serial RS-232, to a device (the "data-logger") which stores the data on media and/or in random access memory (RAM)
data products: higher level derived data from processing and analyzing lower level data, or raw data. The NSF GAGE Facility's Global Navigation Satellite System (GNSS) Data Analysis Centers produce position time series, including daily station position estimates, velocities, coseismic offsets, and tropospheric (zenith delay) parameters, other parameters for approximately 2000 continuously operating GPS receivers spanning a quadrant of Earth's surface encompassing the high Arctic, North America, and Caribbean; see also Herring et al, 2016, Plate Boundary Observatory and related networks: GPS data analysis methods and geodetic products, Rev. Geophys., 54, 759–808
dataset (or data set): the second-highest level of organization of data at the UNAVCO Archive, with one or more dataset with each data group; the dataset allows division by when the data and forms were deposited and who deposited them, media information, whether the data in the dataset is public or not, and a notes area
datum (or geodetic datum): a set of constants and a set of reference points used to define and specify a coordinate system to be used for geodetic control; if a datum is modeled on a reference ellipsoid of revolution (such as WGS-84), then 8 constants are needed to specify a complete datum, e.g. 3 to specify the origin, 3 to specify the orientation of the coordinate system, and 2 to specify the dimensions of the ellipsoid; see also Geodetic datum
datum transformation: a mathematical transformation between two datums, some of which are the 7-parameter Helmert transformation, the 5-parameter Molodensky or 3-parameter Abridged Molodensky transformations, the 10-parameter (7+3) Molodensky-Badekas transformation; see datum transformations and coordinate conversions and transformations including formulas
day-of-year: sometimes incorrectly called the Julian day, the day-of-year is a sequential numbering of the days of the year such that Jan 1 is day-of-year 1, Jan 2 is day-of-year 2, ending with Dec 31 being day-of-year 365 in non-leap years and day-of-year 366 in leap years; also called the ordinal date; see also calendar
DCB: see "differential code bias"
DEM: "Digital Elevation Map"
differencing: a processing technique of GNSS data to help reduce or eliminate certain systematic errors, e.g. differencing the same observable for the same epoch between two different receivers for the same SV helps eliminate satellite-specific biases and differencing between satellites for the same receiver helps eliminate receiver-specific biases
differential code bias: SV or receiver time-dependent correction to pseudocode observables of GNSS data, agreed upon by the IGS to modify data from older receivers to be compatible with newer generation receivers, where typically older GPS-capable receivers used cross correlation to determine the P-code when antispoofing was activated on the GPS SV; see also:
- IGSMAIL-2744
- cc2noncc.f code
- p1c1bias.hist: bias history file for cc2noncc
- AIUB's CODE DCB archive
- MIT GAMIT/GLOBE-K rcvant.dat
DOI: "Digital Object Identifier"; a persistent identifier for a digital publication, digital dataset, or potentially other digital assets belonging to someone; UNAVCO maintains DOI generation and search capabilities for datasets in its GPS/GNSS data archive; see Digital Object Identifiers at UNAVCO
dome: see antenna dome
DOMES number: world-wide unique designation for a particular monument assigned by IERS; application for a DOMES number for a permanent station (for SLR, VLBI, DORIS, GPS, etc.) is made to the IERS TRF section using the DOMES request form
DORIS: "Doppler Orbitography and Radio-positioning Integrated by Satllite"; a dual-frequency Doppler system maintained by the French Space Agency (CNES) consisting of DORIS-capable receivers on-board various LEO satellites and a globally distributed network of 50-60 world-wide ground beacons, whereby the DORIS receivers on-board the satellites track the dual-frequency radio signals transmitted by the ground beacons and generate DORIS data which are measurements made of either the Doppler shift or absolute phase as each satellite moves over the ground-based beacon; positioning accuracy is somewhat lower than with GPS; some of the satellites equipped with DORIS receivers: Envisat, SPOT, HY-2A, CryoSat-2, TOPEX/Poseidon, Jason1, and Jason 2; DORIS is one of the components used to constrain the International Terrestrial Reference Frame
DORIS: "Delft Object-oriented Radar Interferometric Software"; software developed and maintained by the Delft Institute of Earth Observation and Space Systems of Delft University of Technology for InSAR processing; freely available for non-commercial uses
double differencing: a processing technique of GNSS data to help reduce or eliminate both satellite-specific and receiver-specific biases by differencing single differences between two receivers
download: a defined protocol transaction between a receiver and computer to obtain one or more data files stored in the receiver for a completed set of GNSS measurement epochs (compare with data-logging)
draconitic period or draconic period: time for an orbiting body to make two passages through its ascending node; for example, the draconitic period of the Moon about the Earth is 27d 5h 5m 35.8s thus defining a draconic lunar month; to a first approximation is (1 - (omega_dot + delta_n)/n0) of the sidereal period where delta_n is the mean motion difference from the Keplerian mean motion, n0
draconitic year (or draconic year): time taken for the Sun as seen from the Earth to complete one revolution with respect to the same orbital node of an orbiting body; also known as an eclipse year; the average draconitic year for the Moon is 346d 14h 52m 54s (~346.62d); the draconitic year for a Navstar GPS SV is ~351.2 - 351.5d (see, e.g. Analysis effects in IGS station motion time series, P. Rebischung, X. Collilieux, T. van Dam, J. Ray, Z. Altamimi, 2012 IGS Workshop)
E
EarthScope Program: NSF-funded earth science initiative in the USA with initial funding from FY2003 - FY2012 to investigate the structure and evolution of the North American continent and the physical processes controlling earthquakes and volcanic eruptions; see also:
- EarthScope homepage
- PBO (geodetic component)
- SAFOD (deep drilling component)
- USArray (seismic component)
EarthScope Consortium: an organization that represents the community of EarthScope scientists in support of global geophysical research and education; see also:
ECEF: "Earth-centered, Earth-fixed" reference frame, i.e. centered on the Earth's center of mass and rotates with geographic surface of the Earth; see Wikipedia — ECEF; compare with Earth-centered inertial reference frame
ECI: "Earth-centered, inertial" reference frame, i.e. centered on the Earth's center of mass and remains fixed sidereally; see Wikipedia — Earth-centered inertial; compare with Earth-centered Earth-fixed reference frame
email: "electronic mail"; see smtp
epoch: a specific time instance, using the GPS time basis or the time basis from another constellation such as GLONASS time, Galileo system time, or Beidou time or perhaps even UTC
elevation: depending on context:
ellipsoid: a mathematical model describing the general shape of a planet or moon, in general a triaxial ellipsoid with three independent parameters descibing the size and and shape (e.g. the three mutually perpendicular axes); a biaxial ellipsoid is equivalent to an ellipsoid of revolution about one axis, where a special case of a biaxial ellipsoid is an oblate ellipsoid (e.g. due to the rotation of a viscoelastic body like the Earth) and where semi-major axis = equitorial axis > polar axis = semi-minor axis; a position referenced to an ellipsoid serves as metric for computing the local topocentric ENU position based solely on geometry (keeping in mind that ellipsoid "up" is different than the local gradient of geopotential, i.e. local gravity vector)
ellipsoid elevation: (equivalent to "ellipsoid height") the local topocentric vertical distance between an ellipsoid and some point such as a survey point
EOP: "Earth Orientation Parameters"; the parameters defining the connection between the International Celestial Reference Frame and the International Terrestrial Reference Frame:
see Earth Orientation Product Centre of the International Earth Rotation and Reference Systems Service
ephemeris: pl. ephemerides; a set of parameters which describe the position of an astronomical object or artificial satellite at one or more specific times
Euler pole: the pole or axis of rotation about which any movement of a rigid body on the surface of a sphere (e.g. to first approximation, any tectonic plate of the Earth) can be described
Euler vector: the Euler pole plus the rate of rotation about the Euler pole; also known as a rotation vector; can also be represented as in cartesian coordinates as the three components of the rotational velocity
F
FDMA: "Frequency-Division Multiple Access"; a data transfer method by which a different carrier frequency is used for each channel of information; see more at Wikipedia: Frequency-division multiple access
FICA: "Floating Integer Character ASCII"; ASCII exchange representation of GPS data and metadata developed by the Applied Research Laboratory of the University of Texas, Austin which preserves all the information found in the raw data from various receivers
firmware: the compiled software loaded on a GNSS receiver that controls data tracking, file logging, and digital data streaming on the receiver
form: one of the documents to record metadata about a campaign, a site, a monument, a antenna, a receiver, a visit, or installation of a continuous site; a standardized form for any of the above is made available by the UNAVCO Data Group; see forms for:
ftp: "file transfer protocol"; used for pulling (getting) or pushing (putting) ASCII or binary files between two nodes on a TCP/IP network; if set up, can be either be anonymous or via a user account
G
GAGE: NSF National Earth Science Geodetic facility operated by EarthScope Consortium (formerly UNAVCO); see more at GAGE Facility, in two phases:
-
1 Oct 2013 — 30 Sep 2018, operated as the Geodesy Advancing Geosciences and EarthScope facility
1 Oct 2018 — 30 Sep 2023, operated as the Geodesy Advancing GEosciences facility
Galileo: a specific spaceborne radionavigation system financed and to be operated by ESA (European Space Agency) to consist of 27 satellites with 3 active on-orbit spares arranged in three MEO orbital planes at 56° inclination, approximately 23616 km above the Earth (orbital period of 14h 22m, or 5 orbits every 3 sidereal days), using code division multiple access with right-hand circularly polarized carrier frequencies at E2-L1-E1 = 1575.42 MHz, E5a = 1176.45 MHz, E5b = 1207.14 MHz, and E6 = 1278.75 MHz; currently uses GST for its time standard and GTRF as the spatial geodetic reference frame; the Galileo constellation should be operational some time in the early 21st century. The first phase is Galileo In-Orbit Valiation Element (GIOVE) satellites, with GIOVE-A and -B launched in Dec 2005 and Apr 2008; the GIOVE user interface is defined in the GIOVE-A+B (#102) Navigation Signal-in-Space Interface Control Document (8 Aug 2008). The second phase is In-Orbit Validation (IOV) satellites, with launches starting in 2011 and the third phase is Full Operations Capability (FOC) satellites, with launches starting in 2014; see GNSS Modernization: Galileo/GIOVE. The IOV and FOC Galileo user interface is defined in the OS SIS ICD: Galileo Open Service Signal-In-Space Interface Control Document. See also
- FOC — final phase: Full Operations Capability
- GALILEO HIGH ACCURACY SERVICE SIGNAL-IN-SPACE INTERFACE CONTROL DOCUMENT (HAS SIS ICD)
GAMIT/GLOBK/TRACK: a comprehensive suite of software programs for analyzing GPS data primarily to study crustal deformation; developed by Massachusetts Institute of Technology, Scripps Institution of Oceanography, and Harvard University with support from NSF; see also GAMIT/GLOBK/TRACK
GBAS: "Ground Based Agmentation System"; a set of ground transponders to augment GNSS use for civilian applications, which includes LAAS (Local Area Augmentation System); see also:
GEO: "GEostationary Orbit"; a 0° inclination geosynchronous orbit around the Earth, i.e. with a period of exactly one sidereal day; the footprint of the satellite on the surface of the Earth is roughly a point and the satellite, if visible, remains essentially at a fixed azimuth and elevation as observed from a fixed point on the surface of the Earth; compare with IGSO
geocode: a published GHAM definition where an even-byte, big-endian alphanumeric code specifies the latitude and longitude to a certain precision; each two bytes specifies a certain level, where e.g. on the Earth:
- Level 4 (8 characters) delineate a region approximately 480 meters on each side
- Level 6 (12 characters) delineate a region approximately 1.9 meters on each side
- Level 8 (16 characters) delineate a region approximately 1 mm on each side
geodetic datum: see datum
geoid: an equipotential surface that would represent the mean sea or ocean surface of the Earth if the oceans and atmosphere were in equilibrium and at rest relative to the rotating Earth and an extension of that surface into the continental land masses; compared to a mean reference ellipsoid representing the shape of the Earth, the surface of the geoid is higher than such a reference ellipsoid where there is a positive gravity anomaly (due to a mass excess) and lower than the reference ellipsoid where there is a negative gravity anomaly (due to a mass deficit); see YouTube: What is Sea Level? by minutephysics and Wikipedia: Geoid
geoid elevation: (equivalent to "geoid height") the local geopotential vertical distance between a geoid and some point such as a survey point
GETSI: "GEodesy Tools for Societal Issues; NSF-funded project to develop teaching modules in GPS, lidar, and InSAR; see GETSI overview and GETSI homepage at SERC
GGN: "Global GPS Network"; NASA-funded network of GPS or GNSS stations which forms part of the IGS network; see also NASA-GGN monitoring
GIPSY-OASIS: "GNSS Inferred Positioning System-Orbit Analysis Simulation Software"; software programs for analyzing GPS data developed by Jet Propulsion Laboratory and maintained by the Near-Earth Tracking Applications and Systems groups; see also GIPSY-OASIS II
Global mapping function (GMF): a global grid of wet and hydrostatic delays in the troposphere of GNSS carrier waves plus a mapping function that describes the delays as a function of elevation angle of each SV relative to the GNSS receiver. Based on data from the global ECMWF numerical weather model. The coefficients of the GMF were obtained from an expansion of the Vienna Mapping Function (VMF1) parameters into spherical harmonics on a global grid. Similar to the Niell Mapping Function (NMF), the values of the coefficients require only the station coordinates and the day of year as input parameters. Compared to the 6-hourly values of the VMF1 a slight degradation in short-term precision occurs using the empirical GMF. However, the regional height biases and annual errors of NMF are significantly reduced with GMF.; see also Global Mapping Function (GMF): A new empirical mapping function based on numerical weather model data, Boehm, J., Geophys. Res. Lett., 33, L07304, 2006
GLONASS: "Global Navigation Satellite System"; a specific spaceborne radionavigation system financed and operated by the Soviet Commonwealth planned to consist of 21 satellites with 3 active on-orbit spares arranged in three MEO orbital planes at 64.8° inclination, approximately 19130 km above the Earth (orbital period of 11h 16m, or 17 orbits every 8 sidereal days), using frequency-division multiple access with right-hand circularly polarized carrier frequencies at G1 = 1602.00 MHz + k 9/16 MHz and G2 = 1246.00 MHz + k 7/16 MHz (k = "frequency channel number" integer, have values 0,1,...,24 from 1982 to 1998, 0,1,...,13 from 1998 to 2005 and -7,-6,...,6 after 2005; G2 is 7/9 of G1) and, starting with GLONASS-K SVs, code division multiple access with a right-hand circularly polarized carrier frequency at G3 = 1202.025 MHz, using GLONASS time as the time standard and PZ-90 as the spatial geodetic reference frame. The public user interface is defined in the ICD-GLONASS: Global Navigation Satellite System (GLONASS): Interface Control Document, Navigational radiosignal in bands L1, L2
GLONASS time: time system used by GLONASS, based on the UTC(SU) time frame generated by Russian organizations, referred to the Moscow Standard Time which has an offset of three hours from Greenwich time; besides differences of full hours and full leap seconds (which GLONASS time includes), the difference between the GPS and GLONASS time frames have been computed to differ by 20-30 microseconds
GMT: "Generic Mapping Tools"; open-source command-line tools for manipulating geographic and other datasets and producing PostScript illustrations; see also GMT homepage
GMTSAR: open source (under GNU General Public License) InSAR processing software designed for users familiar with the Generic Mapping Tools software package; written in C and compiles on any computer where GMT and NetCDF are installed; see
GNET: "Greenland NETwork"; network of GNSS stations in Greenland; see also POLENET
GNSS: "Global Navigation Satellite System"; any of, or some combination of, the operational spaceborne radionavigation systems, at this time being Navstar GPS, GLONASS, Beidou/Compass, Galileo, QZSS, IRNSS, and/or SBAS; GNSS (using principally GPS at the present time) is one of the components used to constrain the International Terrestrial Reference Frame; see also graphic overview of GNNS signals
{kind=link}
GNSS modernization: the general components being (1) the US launching new Navstar GPS SVs which broadcast more signals than the orignal GPS L1C/A, L1P, and L2P. e.g. GPS L2C, L5, M-code signals, L1C; (2) Russia launching new GLONASS SVs which broadcast more signals than the original GLONASS L1-SA, L1-HA, and L2-HA, e.g. L2-SA and G3; (3) various countries launching new SBAS SVs which broadcast more signals than the original SBAS L1C/A, e.g. SBAS L5; (4) other countries launching and operating their own GNSS constellation such as Beidou/Compass, Galileo, QZSS, and IRNSS which broadcast signals which (ideally) complement one another; see also graphic overview of GNNS signals
GPS: "Global Positioning System"; a specific spaceborne radionavigation system financed and operated by the U.S. Department of Defense consisting of Navstar satellites, a minumum of 21 operational and 3 active in-orbit spares, arranged in six MEO orbital planes at 63° (Block I SVs, all now decommissioned from active service) and 55° (Block II SVs) inclinations, approximately 20197 km above the Earth (orbital period of 11h 58m, or 2 orbits every 1 sidereal day), using code division multiple access with right-hand circularly polarized L-band carrier frequencies at L1 = 1575.42 MHz, L2 = 1227.60 MHz (= 120/154 of L1), and L5 = 1176.45 MHz (= 115/154 of L1; L5 in test mode one Block IIR-M SV, and operational in all Block IIF SVs and upcoming Block III SVs), currently uses GPS time as the time standard and WGS-84 as the spatial geodetic reference frame; the unclassified user interface of which is defined in the IS-GPS-200: Navstar GPS Space Segment/Navigation User Interfaces
GPS time: also GPST; time in seconds, skipping UTC leap seconds, since start epoch on Sunday 00:00 6 Jan 1980 UTC (= 6.0 Jan 1980 UTC) using UTC as defined by the master clock of the U.S. Naval Observatory, UTC(USNO,MC) (see also any recent "Time and Frequency Bulletin" published by the National Institute of Standards and Technology, U.S. Department of Commerce) (see also GPS time of week, GPS week, calendar)
GPS time of week: the seconds since the beginning of a GPS week; this will not exceed 604800 even for weeks containing positive UTC leap seconds since GPS time skips UTC leap seconds
GPS week: complete weeks, skipping UTC leap seconds, since GPST start epoch on Sunday 00:00 6 Jan 1980 UTC (= 6.0 Jan 1980 UTC); e.g. week starting Sunday 6 Jan 1980 was GPS week 0, week starting Sunday 13 Jan 1980 was GPS week 1, and so on; only 10 bits are used to represent the GPS week modulo 1024 in the L1C/A broadcast navigation messages from the GPS SVs, leading to a modulo 1024 rollover problem on 22.0 Aug 1999 (GPS week 1024), 7.0 Apr 2019 (GPS week 2048), 21.0 Nov 2038 (GPS week 3072), and so on (see also calendar)
group: or data group; the top level of organization of GPS/GNSS data at the UNAVCO Archive, each group being made up of data from probably from one or more projects; usually a group is related on a one-to-one basis to a campaign, or a network of permanent stations, or a single field support effort for multiple regional projects; subdivision of the group is by datasets; storage of removable media, log sheets, etc. in the Physical Repository is by group ID number
group ID:
for the purposes of the UNAVCO Archive, a unique number specifying a specific group;
the group ID is also used as the primary organizational name for campaign data
on the UNAVCO GPS/GNSS ftp server, e.g.
GSAC: "GPS Seamless Archive Center"; participant in the Seamless Archive initiative promoted as an activity for the UNAVCO community by NSF; see also GSAC project overview and GSAC software
GST: "Galileo System Time"; time system of Galileo, maintained by the Galileo Central Segment; synchronized with TIA with a nominal offset within ±50 nanoseconds; GST start epoch at 13 seconds before Sunday 00:00:00 22 Aug 1999 UTC (= 22.0 Aug 1999 GPST, neaning that GST and GPS time are only offset by 1024 604800-second weeks and by zero leap seconds); GST is set by the Galileo Control Centre, in Fucino, Italy, by the Precise Timing Facility (PTF) and the UTC disseminated by Galileo is the mean of the UTC of 5 European time labs: Observatoire de Paris (France), PTB (Germany), IT (Italy), ROA (Spain) and SP (Sweden)
GTRF: "Galileo Terrestrial Reference Frame"; spatial reference system of Galileo and an independent realization of the ITRS; as of version GTRF09v01, GTRF is identical to ITRF2005 (e.g. see Galileo Terrestrial Reference Frame)
H
Hatanaka (compression/decompression): a compression/decompression scheme of a RINEX observation file into a smaller ASCII format used by the IGS and UNAVCO. The Hatanaka-compressed ASCII format version of a RINEX observation file is frequently used in conjuction with the UNIX compress, zip, gzip or other generalized compression utilities to create a very small file for Internet transfer. (See also Hatanaka Format Information at UNAVCO and Hatanaka compression/decompression.)
I
ICD-GLONASS: the public "interface specification" document for GLONASS; see:
- draft versions of future CDMA signals in L1, L2, and L3 bands:
- version 5.1 (2008) (in English)
- version 5.0 (2002) (in English)
- version 4.0 (1998) (in English)
ICRF: "International Celestial Reference Frame"; realization of the International Celestial Reference System (ICRS)
IERS: "International Earth Rotation and Reference Systems Service"; see also:
- IERS Central Bureau homepage
- IERS Publications: Messages, Bulletins, Technical Notes, Annual Reports
IGS: "International GNSS Service", formally the "International GPS Service (for Geodynamics)"; a voluntary federation of more than 200 worldwide agencies that pool resources and permanent GNSS station data to generate precise GNSS products, established by the International Association of Geodesy (IAG) to aid high-precision geodetic positioning by providing carrier phase and pseudorange RINEX data from permanent stations around the world, high-precision orbits for all tracked GNSS satellites (~20 cm or better in accuracy), earth rotation parameters, etc.; also see:
and text documentation:
IGS log: a combination site and visit history log developed by the IGS for recording permanent station metadata in an ASCII format; see also:
IGSO: "Inclined Geosynchronous Orbit"; a non-0° inclination geosynchronous orbit around the Earth, i.e. with a period of exactly one sidereal day; the footprint of the satellite on the surface of the Earth can be a roughly symmetrical to a very non-symmetrical figure-"8" pattern; compare with GEO
Iridium: a satellite constellation with 66 active LEO satellites and additional spares at a height of approximately 781 km above the Earth at a high orbital inclination of 86.4° in six orbital planes with 11 active satellites in each plane, for global voice and data communications, operating within 1618.85 to 1626.50 MHz; see also Iridium satellite constellation
InSAR: "Interferometric Synthetic Apeture Radar"; a remote sensing technology using two or more SAR images to interferometrically create a DEM or map of surface deformation relative to a DEM, the later having the potential to measure centimeter-scale changes in surface deformation over time spans of days to years
inspection: going to a setup/station for the purpose of checking equipment, general maintainance, etc. without modifying any of the setup (see also visit)
International Atomic Time: see TIA
IONEX: "Ionosphere map Exchange"; ASCII exchange representation of 2- and 3-dimensional TEC-value maps given in a geographic grid; see also
IP: "Internet Protocol"; see Wikipedia: Internet Protocol
IRIS: "Incorporated Research Institutions for Seismology"; currently responsible for the USArray component of EarthScope; see more at IRIS website
IRNSS: "Indian Regional Navigation Satellite System"; a specific spaceborne radionavigation system developed by the Indian Space Research Organisation (ISRO) planned to expand to seven satellites, four in 29° inclined geosynchronous orbits centered in pairs at 55°E and 111°E and three in geostationary orbit at 34°E, 83°E, and 132°E with an expected accuracy for positioning of 10 meters or better in the Indian subcontinent and 20 meters or better in the Indian Ocean, probably using code division multiple access with a right-hand circularly polarized L-band carrier frequency at L5 = 1176.45 MHz and an S-band carrier frequency at S1 = 2492.028 MHz; currently uses IRNSS system time (which is nominally identical to Galileo system time) for its time standard and WGS-84 as the spatial geodetic reference frame; see also List of IRSO Navigation Satellites
IRNSS ICD: register at IRNSS to access the IRNSS Signal-in-Space ICD for SPS (version 1.0 1 Sept 2014)
IS-GPS-200: the unclassified "interface specification" document for the Navstar GPS Space Segment/Navigation User Interfaces; see:
- GPS References, Navigation Center, U.S. Dept. of Homeland Security
- IS-GPS-200, Rev. H (24 Sep 2013)
- IS-GPS-200, Rev. G (5 Sep 2012)
- IS-GPS-200, Rev. F (21 Sep 2011)
- IS-GPS-200, Rev. E (8 Jun 2010)
- IS-GPS-200, Rev. D (7 Mar 2006)
and related:
- IS-GPS-705, Rev. D (24 Sep 2013) User Segement L5 Interfaces
- IS-GPS-800, Rev. D (24 Sep 2013) User Segement L1C Interfaces
IS-QZSS: the public "interface specification" document for QZSS; see:
- IS-QZSS-PNT-003 (5 Nov 2018)
ITRF: "International Terrestrial Reference Frame"; a specific realization of the International Terrestrial Reference System (ITRS), produced by the IERS ITRS Centre; see The International Terrestrial Reference Frame (ITRF) and for details of specific frames:
and realizations ITRF(19)89, ITRF(19)90, ITRF(19)91, and ITRF(19)95 (see also WGS-84, PZ-90)
ITRS: "International Terrestrial Reference System"; see The International Terrestrial Reference System (ITRS) at the International Earth Rotation and Reference Systems Service (IERS)
J
Julian date: solar days since 1.5 Universal Time (i.e. noon on the 1st) Jan 4713 BCE (on the proleptic Julian calendar); the start of GPS time (i.e. GPS standard epoch) 6.0 Jan 1980 is exactly equivalent to Julian date 2444244.5 (i.e. GPS time and UTC were essentially the same (to ±1 microsecond) from 6.0 Jan 1980 to 1.0 Jul 1981 when the first UTC leap second offset was introduced during GPS time at the end of 30 Jun 1981); compare with modified Julian date; see also Julian Date Converter
Julian day: same as Julian date, though sometimes incorrectly used to refer to the day-of-year or ordinal date of the year
K
L
LAAS: "Local Area Agmentation System", being developed by the Federal Aviation Administration (FAA) in the USA; see LAAS Program
LARISSA: "Larsen Ice Shelf System, Antarctica"; NSF-funded initiative to study the environmental changes in the Larsen Ice Shelf; see also POLENET at UNAVCO and LARISSA homepage
latitude: geographic coordinate describing the polar (north-south) angular offset of a point from a reference plane (e.g. equator) equidistant (or nearly so) from the poles of a reference axis of a spheroidal body; for a body with a fairly stable axis of rotation, like the Earth, the reference axis is either the axis of rotation at a specified epoch or the time-averaged position of the axis of rotation over a specified time interval, or for a body with chaotic rotation, like Saturn's moon, Hyperion, the reference axis might be based on the geometrical shape of the body or one of the three principal axes of inertia; for a spheroidal body modeled as biaxial ellipsoid, one usually uses either:
- geodetic (or geographic) latitude: the angle between the normal to the ellipsoid and the reference plane (e.g. equator)
- geocentric latitude (for the Earth) or plantocentric latitude (for other bodies): the angle between the defined center of the body (based on center of mass or geometrical center) and the reference plane (e.g. equator)
so if the spheroidal body is modeled as a sphere, then the geodetic latitude and the geocentric (or plantocentric) latitude are exactly equal; see also Wikipedia: Latitude, especially for other definitions of latitude, such as authalic latitude, conformal latitude, isometric latitude, and so on; compare with longitude
lcode: "location code"; a lexically-sortable, non-unique, case-insensitive, 6-character alphanumeric string which geographically locates a Earth-based surface monument to at least a 100m x 100m square on the Earth
LDM: "Local Data Manager"; product of UCAR's Unidata group that allows secure pushing and/or pulling of files between two nodes of a TCP/IP network; establishing LDM on a group of nodes allows the establishment of a secure data flow topology; see also Unidata's LDM homepage
leap second:
second added (or subtracted) to keep the UTC time scale within
±0.9 second of the UT1 time scale, which changes
due to changes in the rotation rate of the Earth; since the introduction
of leap seconds into UTC (with the first on 1972 Jun 30), only positive
leap seconds have been included which begin at 23 h 59 min 60 s UTC and
end at 0 h 0 min 0 s UTC demarking the beginning of the next day;
positive leap seconds since the beginning of GPS time
have been inserted at the end of:
| 1981 Jun 30 | |
| 1982 Jun 30 | |
| 1983 Jun 30 | |
| 1985 Jun 30 | |
| 1987 Dec 31 | |
| 1989 Dec 31 | |
| 1990 Dec 31 | |
| 1992 Jun 30 | |
| 1993 Jun 30 | |
| 1994 Jun 30 | |
| 1995 Dec 31 | |
| 1997 Jun 30 | |
| 1998 Dec 31 | |
| 2005 Dec 31 | |
| 2008 Dec 31 | |
| 2012 Jun 30 | |
| 2015 Jun 30 | |
| 2016 Dec 31 |
Thus:
between 1.0 Jan 1999 UTC and 1.0 Jan 2006 UTC, GPS - 13 seconds = UTC;
between 1.0 Jan 2006 UTC and 1.0 Jan 2009 UTC, GPS - 14 seconds = UTC;
between 1.0 Jan 2009 UTC and 1.0 Jul 2012 UTC, GPS - 15 seconds = UTC;
between 1.0 Jul 2012 UTC and 1.0 Jul 2015 UTC, GPS - 16 seconds = UTC;
between 1.0 Jul 2015 UTC and 1.0 Jan 2017 UTC, GPS - 17 seconds = UTC;
and as of 1.0 Jan 2017 UTC (and before the next leap second is inserted), GPS - 18 seconds = UTC.
See NIST Leap second and UT1-UTC information for the latest leap second listing (updated monthly); see USNO GPS "UT" Solution to obtain a daily listing of observed UT1-UTC and see IERS Bulletin A for predicted UT1-UTC; see also USNO leap second for more background.
Note: A positive leap second was inserted at the end of December 2016.
See also The leap second: its history and possible future, Nelson et al., Metrologia, 38, 509-529, 2001.
Articles discussing the lack of leap seconds between the end of 1998 and the end of 2005:
- Goddard Space Flight Center: Satellites reveal a mystery of large change in Earth's gravity field
- National Geographic News: Why is Earth's Girth Bulging?
LEO: "Low Earth Orbit"; any orbit around the Earth with an orbital period of less than about two hours
lidar: a portmanteau of the words "light" and "radar" (1963), although commonly (and incorrectly) assumed to be an acronym for "Light Detection And Ranging" or "Laser Imaging, Detection, And Ranging"; a remote sensing technology that measures the range to a target by timing laser light reflected back by the target; see also TLS and ALS
log: documentation of a site description and/or a visit; see also form and sitelog
log file: electronic version of a log sheet, e.g. an on-line IGS site log
log sheet: a blank or filled-in log on paper
longitude: geographic coordinate describing the azimuthal (east-west) angular offset of a point from a reference great-circle line (e.g. prime meridian) connecting the poles of a reference axis of the body; for a body with a fairly stable axis of rotation, like the Earth, the reference axis is either the axis of rotation at a specified epoch or the time-averaged position of the axis of rotation over a specified time interval, or for a body with chaotic rotation, like Saturn's moon, Hyperion, the reference axis might be based on the geometrical shape of the body or one of the three principal axes of inertia; see also Wikipedia: Longitude; compare with latitude
LSM: "Laser Strainmeter"; a type of strainmeter using interferometric lidar to measure changes in range thus allowing measurements of strain over time; see Laser Strainmeters
M
magnetic declination: offset between the direction of true geographic north and the local direction of magnetic north; see NOAA/NGDC's geomagnetic calculators:
- magnetic declination + rate
- 3-d magnetic field orientation + rate
- current field grid, 1 of 7 parameters
mark: if it exists, and it should, the identifiable and distinct physical shape on a marker which designates the actual survey point of the marker, e.g. the dimple in the center of a USGS brass cap; synonymous with survey mark
marker: if it exists, an identifiable and distinct component of a monument having a survey point, e.g. a USGS brass cap
mean sea level: the time-averaged level of the ocean's surface and by geopotential extrapolation to land-covered areas; see also global mean sea level (GMSL)
mean sea level elevation: (equivalent to "mean sea level height") the local geopotential vertical distance between a mean sea level and some point such as a survey point
media: or physical media; best explained by example: 9-track, QIC (1/4" cartridge tape), audio cassette tape, 3.5" or 5.25" floppy disk, 4mm DAT, 8mm data tape, 8mm video tape, optical disk, magneto-optical disk, PC-Card (PCMCIA), Zip disk, Jazz disk, CD-R, CD-ROM, hard disk, etc.
MEO: "Medium Earth Orbit"; any orbit around the Earth with an orbital period of about two to sixteen hours; the SVs of GNSS constellations far into this range
metadata: ancillary information about data; for GNSS data the ancillary information is required for the accurate processing of observation and navigation data to determine the position, velocity, and/or acceleration of a single or set of survey points; e.g. the antenna reference point relative to a survey point (if no horizontal offset, this is just the "antenna height"), antenna type, receiver type, approximate WGS-84 coordinates, etc.; most of the information in a RINEX file header is metadata
MJD: "modified Julian date"; see modified Julian date for definition
modified Julian date: an offset version of the Julian date obtained by subtracting 2400000.5 days from the Julian date; thus the start of GPS time (i.e. GPS standard epoch) 6.0 Jan 1980 UTC is equivalent to a modified Julian date of 44244.0
monument: a physical object for which one is trying to collect data for a determination of position, velocity, and/or acceleration for one or more survey points on or very near that object. (In the case of a zero offset for the antenna, the survey point of measurement is the phase center(s) of the antenna, which may or may not actually correspond to a physical point on the object.) (see also lcode, marker, monument code, monument ID, monument name, monument setting, site)
monument code: a non-unique, case-insensitive, 4-character alphanumeric string to identify a specific survey point on a specific monument, e.g. "PEAK" = "peak"; also known as the 4-character ID of a survey point of a monument, obtained from the monument record form or something similar
monument ID: for the internal purposes of the UNAVCO Archive, a unique number specifying a specific survey point on a specific monument; if multiple survey points are used on a single monument, then multiple monument IDs would be assigned corresponding to each survey point used
monument name: a (hopefully) descriptive name for a particular monument; a 60-character version of which could be used in the RINEX Observation file for the non-optional MARKER NAME field
monument setting: a date stamp associated with a monument or a marker on a monument indicating either 1) when the monument was established, or if that time is not known 2) when the monument was first known to be used
multipath: in context of GNSS technology, multipath interference, whereby the electrodynamic waves from a GNSS SV travel to the antenna by way of two or more paths and interfere with one another; typically multipath is mainly due to one or more reflections of the GHz waves in the vicinity of the antenna; all or most GNSS signals are righthand circularly polarized, so a single reflection (such as from the ground) results in a mostly lefthand circularly polarized wave which can be more easily filtered out thus reducing the potential for multipath interference and, in addition, most high-end GNSS antennae have a ground plane or a GHz-absorbing material below the active antenna element to reduce interfence from many reflected signals from surfaces below the antenna ground plane
N
NASA: "National Aeronautics and Space Administration"; one UNAVCO's core sponsors; see also NASA website
NAT: "Network Address Translation"; a methodology of modifying network address information in IP datagram packet headers while they are in transit across a traffic routing device for the purpose of remapping one IP address space into another
NetCDF: a set of software libraries and self-describing, machine-independent data formats that support the creation, access, and sharing of array-oriented scientific data developed and maintained by Unidata at the University Corporation for Atmospheric Research (UCAR); see more at UCAR/Unidata's NetCDF homepage
network: an array of GNSS setups and/or stations operating at the same time for the purpose of collecting more or less continuous data over the extent of the array; the spatial extent of the array can be global or anything smaller
Niell mapping function: a global grid of wet and hydrostatic delays in the troposphere of GNSS carrier waves plus a mapping function that describes the delays as a function of elevation angle of each SV relative to the GNSS receiver; see also Global mapping functions for the atmosphere delay at radio wavelengths, A. E. Niell, JGR, 101, b2, 3227-3246, 1996
NGL: "Nevada Geodetic Laboratory"; at University of Nevada, Reno; see more at NGL homepage
NGS: "National Geodetic Survey"; see more at NGS website
NSF: "National Science Foundation"; one UNAVCO's core sponsors; see more at NSF website
NOTA: "Network of the Americas": Formerly known as the Plate Boundary Observatory (PBO) network, one of the main geodetic networks of the NSF GAGE Facility operated by EarthScope, is an international geophysics sensor network spanning more than 20 countries and composed of more than 1,200 continuously operating instruments, including high-precision GPS (and multi-constellation GNSS) stations and borehole strain, seismic, and tilt instruments. The footprint of the network stretches from the Aleutian Islands to the Caribbean. It precisely measures the slow movement of tectonic plates and the sudden movement of earthquakes, among other solid Earth, hydrologic, and atmospheric phenomena; see also EarthScope - Plate Boundary Observatory (PBO)
NTrip: "Networked Transport of RTCM via Internet Protocol"; an application-level protocol streaming GNSS data over the Internet, and is a generic, stateless protocol based on the Hypertext Transfer Protocol HTTP/1.1 where the HTTP objects are enhanced to support GNSS data streams; see also:
O
observable: any measurement between the space segment and the user segment of Navstar GPS, GLONASS, Beidou/Compass, Galileo, QZSS, IRNSS, or SBAS, e.g. receiver clock epoch time, and at the epoch: carrier phase (i.e. cycle count) measurements at specific carrier frequencies (e.g. GPS L1, L2, L5), pseudorange measurements of specific digital modulated codes (e.g. GPS C/A, P) on those carrier frequencies, doppler measurements of the carrier frequencies, signal-to-noise measurements of the carrier frequencies, etc.
observation: a set of carrier phase and/or code pseudorange observables for an individual Navstar GPS, GLONASS, Beidou/Compass, Galileo, QZSS, IRNSS, or SBAS, SV for a specific epoch
occupation: a visit (depending on whether you prefer a militaristic or pacific term)
off-site: someplace other than the site
ordinal date: same as day-of-year
On-line Repository: dedicated electronic RAID storage of archived data files at the UNAVCO Archive
OS SIS ICD: the unclassified "interface specification" document for the Galileo Open Service Signal-In-Space Interface Control Document; see:
- OS SIS ICD (Issue 1.3, Dec 2016) at European GNSS Service Centre
P
PANGA: "Pacific Northwest Geodetic Array"; see also:
- PANGA, Central Washington University homepage
- University of Washington GPS Geodesy homepage, including PANGA
PBO: "Plate Boundary Observatory"; one of the main components of EarthScope, this is a set of surface (GPS permanent stations) and subsurface (strainmeters) to measure the crustal motion and deformation in the plate boundary between the North American and Pacific plates in the western USA and Alaska; see also EarthScope - Plate Boundary Observatory (PBO)
PCO: "Phase Center Offset"; offsets of a GNSS antenna phase center can be measured and corrected for when processing GNSS data; PCOs for commonly used antennas are made available in the ANTEX format
PCV: "Phase Center Variation"; variations of a GNSS antenna phase center can be measured and corrected for when processing GNSS data; PCVs for commonly used antennas are made available in the ANTEX format
permanent station: very long-term setup at a continous site; implies long-term power and possibly other infrastructure such as communication
permanent station data: data from one or more permanent stations
phase center: relative to the user's active antenna element and ground plane, where a specific carrier wave from GNSS SVs seem to be received; the phase center may be modeled as averaged over all possible directions, modeled as a function of elevation from the ground plane, or even modeled as a function of azimuth and elevation (see phase center pattern); similarly, the GNSS SV's antenna complex has a phase center for each carrier wave being transmitted
phase center pattern: the variation of the effective phase center of the antenna, usually by azimuth and elevation for a given GNSS SV carrier frequency; see also
- GPS antenna calibrations by the staff of the Instrumentation and Methodologies Branch, Geodetic Services Division, National Geodetic Survey, NOAA, Dept. of Commerce
- igs_01.pcv: IGS antenna phase center offsets and variations
- UNAVCO ARI antenna calibration report
Physical Repository: dedicated storage room(s) for physical media, log sheets, etc. at the UNAVCO Archive, organized by group ID number
POLENET: "POLar Earth Observing NETwork"; network of GNSS stations in the polar regions of the Earth, broken in the Antarctic Network (ANET) and Greenland Network (GNET) subnetworks; see POLENET at UNAVCO and POLENET homepage
PPP: "Point-to-Point Protocol"; a data link protocol that establishs a direct connection between two nodes and can provide connection authentication, transmission encryption, and compression
PPP: "Precise Point Positioning"; computational method for GNSS positioning with position solutions at the centimeter to decimeter level using precise SV positions (such as with SP3) and clocks combined with multi-frequency carrier phase data; requires fewer global reference stations than classic differential approaches; one set of precise orbit and clock data (computed by a central processing centre) is valid for all users everywhere; the PPP solution is largely unaffected by individual reference-station failures
PPP-AR: Precise Point Positioning with integer Ambiguity Resolution
principal investigator: the big cheese/head honcho/primary cognizant entity associated with a project
PRN: "Pseudo-Random Noise" (or sometimes Number); an integer sequence number, 1-32, assigned to each of the Navstar GPS SVs to indicate its own unique C/A-code and its own unique P-code; this is the GPS SV number that is used in a RINEX observation or navigation file that is used to distinguish each satellite at the same carrier frequency, e.g. PRNs for GPS, GBAS, SBAS, Galileo, Beidou, QZSS, IRNSS:
- 1 – 32 are used for the current constellation of GPS SVs
- 33 – 37 are reserved for other uses, such as ground transmitters
- 38 – 63 are reserved for future GPS SVs
- 64 – 119 are reserved for future GBAS amd other augmentation systems
- 120 – 158 are reserved for SBAS
- 159 – 210 are reserved for other GNSS applications
project: proposed or realized work in one or more of the following: site reconnaissance, monument installation (or monumentation), permanent station installation, campaign or permanent station data collection
pseudorange: the range (or distance) from a given GNSS SV to the user's antenna plus errors due to one or more of the following:
- clock error of the user's receiver
- non-linear path and time-delay of the GNSS signal between the SV and the user's antenna due to atmospheric refraction (mostly in the ionosphere), i.e. the path is not in a vacuum
Due mainly to the dispersive nature of the ionosphere at GHz frequencies, the paths and time-delays of different GNSS signals vary leading to different pseudorange measurements on the different GNSS signals. The pseudorange is found by a cross-correlation of the signal's code with the reference code known by the receiver and finding the time shift of the broadcast code compared to the receiver's time, i.e. the time shift multiplied by the speed of light is the pseudorange measurement, and since this technique relies on the signal's code, this measurement is sometimes also referred to as a code pseudorange
PS-InSAR: "Persistent Scatterer Interferometric Synthetic Apeture Radar"; next-generation InSAR processing techniques which remove atmospheric effects by searching the imagery and interferograms for pixels that display stable amplitude and coherent phase throughout every image of the dataset; these points in the dataset are referred to as permanent or persistent scatterers
PSK: "Phase-Shift Keying"; one of several digitial modulation schemes that allows binary data to be imprinted on a reference signal such as a GNSS carrier wave; the traditional GPS L1C/A, L1P(Y), and L2P(Y) signals use binary phase-shift keying (BPSK) which have most of the spectral energy of the signal concentrated around the carrier frequency; compare with binary offset carrier (BOC) modulation; see more at Wikipedia: Phase-Shift Keying
PZ-90: "Parameters of the Earth 1990" (PZ-90 in Russian); formerly known as Soviet Geodetic System 1990 (SGS-90) and nearly identical to SGS-85; the ECEF spatial coordinate system used by GLONASS; the estimated transformation between SGS-85 and WGS-84 included a 4 meter offset of the z-axis and a 0.6" (3e-6 radian) rotation about the z-axis, whereas the transformation between PZ-90 and WGS-84 is only a 0.33" to 0.40" (1.6e-6 to 1.9e-6 radian) rotation about the z-axis, with perhaps a 2.5 meter offset of the y-axis; the system is defined as:
- the origin is the center of mass of the Earth
- z-axis is directed to the average North pole of the 1900-1905 epoch
- x-axis is in the equator plane of the 1900-1905 epoch, the XOZ plane being parallel to the average Greenwich meridian
- y-axis completes the system as a right-handed rectangular system
Some of the major constants in PZ-90, which models the Earth as an ellipsoid of revolution, are:
- semimajor axis (origin to equator on x-y plane) = 6378.136 km
- flattening = 1/298.257839303
- angular velocity of Earth = 7.2921150e-5 radians/s
- G x mass of Earth = 3.9860044e14 m**3/s**2
- second zonal harmonic coefficient = 1.08262575e-3
- speed of light in vacuum = 2.99792458e8 m/s
Q
QZSS: "Quasi- Zenith Satellite System"; a specific spaceborne radionavigation system financed and operated by the Japan planned to consist of up to 18 IGSO satellites (mean height of approximately 35786 km above mean sea level but in a highly elliptical orbit, with an orbital period of 23h 56m 04.1s, or 1 orbit every sidereal day) using code division multiple access with a right-hand circularly polarized carrier frequencies at L1 = 1575.42 MHz, L2 = 1227.60 MHz, L5 = 1176.45 MHz, and LEX = 1278.75 MHz; operational and proposed satellites of PRN 193 to 202 (with 203-210 as potential spares):
- L1-SAIF performance enhancement signal on 183-192, though 188-192 are used for QZS maintenance/test purposes and must not be used by users
- LEX performance enhancement signal on 193-202, though 198-202 are used for QZS maintenance/test purposes and must not be used by users
- other QZSS signals on 193-202, though 198-202 are used for QZS maintenance/test purposes and must not be used by users
- thus normal user PRNs for initial QZSS without L1-SAIF are 193-197
The public user interface is defined in the IS-QZSS: Quasi-Zenith Satellite System Navigation Service: Interface Specification for QZSS
R
radome: see antenna dome
raw data: lowest-level, proprietary or non-proprietary data file(s) available from a GNSS receiver containing both data and metadata; e.g. Trimble's DAT, EPH, ION, and MES download files, AOA's ConanBinary or TurboBinary files, Ashtech's B-, E-, and S-download files, etc.; usually a majority of the data and metadata in a data file is in an encoded binary format
raw file code: a non-unique, case-insensitive, 4-character alphanumeric string to identify a specific survey point on a specific monument, e.g. "PEAK" = "peak"; also known as the 4-character ID of a survey point of a monument, obtained from the raw data file itself (see also monument code and visit code)
real-time data: continuous data supplied with very low time latency
real-time monitoring: continuous data is transferred near-real-time via one or more communication paths off-site for near-real-time data collection, quality checking, and/or processing; time delay should generally be no more than a few minutes
receiver: device used to decode the digital and analog components of the GNSS signal supplied by the antenna, as specified in part by the IS-GPS-200 for GPS, or the analog for GLONASS, Beidou/Compass, Galileo, QZSS, IRNSS, or SBAS
receiver session: for a modern GNSS receiver, a specific type of GNSS data to be recorded on the receiver as one or more data files (to be downloaded at a later time) or to be streamed from the receiver in real time; configuration options for a session might include (although these are dependent on the receiver manufacturer and the receiver firmware):
-
specific data format;
specific sampling internal;
specific time span of each file or stream;
specifications of what should be included in the session, which might also include:
-
which GNSS constellations or specific satellites are to be included;
which GNSS signals and/or observables;
which GNSS ephemerides;
which (if any) records from external sensors
-
file naming scheme for the session;
file management over time as files for the session accumulate on the receiver
-
protocol of the stream
reference frame (or geodetic reference frame): the coordinate system of a geodetic datum
reference point: 1) specific survey points used to help realize a geodetic datum; 2) a special case of a survey point usually used to locate a primary survey point or serve as a backup to a primary survey point especially in cases where the primary survey point has been lost or destroyed
RESESS: "Research Experience in Solid Earth Science for Students; undergraduate summer intership and support program in the Earth sciences hosted at UNAVCO in Boulder, Colorado; see RESESS overview and RESESS homepage
RINEX: "Receiver Independent Exchange"; ASCII exchange representation of GNSS data and metadata currently conforming to the specification given in "RINEX: The Receiver Independent Exchange Format Version 2(.xx)" available from the Astronomical Institute, University of Berne (AIUB); one of several general file types:
- RINEX observation (OBS) file
- RINEX navigation (NAV) file (e.g. for GPS, GLONASS, Beidou/Compass, Galileo, QZSS, IRNSS, and/or SBAS)
- RINEX meteorological (MET) file
- RINEX clock (CLK) file
also see documentation:
- IGS format documentation listing at IGS Central Bureau (start here if a link below fails)
- RINEX Ver. 2(.00) (Apr 1993)
- RINEX Ver. 2.10 (10 Dec 2007)
- RINEX SBAS NAV Ver. 2.10 (19 Dec 2003)
- RINEX Ver. 2.11 (10 Dec 2007)
- RINEX Ver. 3.00 (28 Nov 2007)
- RINEX Ver. 3.01 (22 Jun 2009)
- RINEX Ver. 3.02 (3 Apr 2013)
- RINEX Ver. 3.03 (14 Jul 2015)
- RINEX Ver. 3.04 (23 Nov 2018)
and related:
- IONEX Ver. 1.00 (25 Feb 1998)
- Earth Rotation Parameters Ver. 2 (10 Jul 1998)
- Clock Ver. 3.00 (14 Nov 2006)
- Clock Ver. 3.02 (2 Sep 2010)
and see
- IGS antenna and receiver designations for RINEX, available at JPL's IGS Central Bureau ftp site; these RINEX entries for receiver and antenna types are not part of the RINEX specification, but, rather, represent an effort by the IGS to standardize the ASCII strings used to describe various common receiver and antenna types and are widely accepted
ROI_PAC: "Repeat Orbit Interferometry Package"; a UNIX-based software package for processing SAR images to create InSAR images; developed by the Jet Propulsion Laboratory and the California Institute of Technology; see also ROI_PAC homepage
RTCM: "Radio Technical Commission Maritime Services"; for example, RTCM Special Committee 104 (SC-104) recommends standards for differential and real-time GPS/GNSS data exchange; see also RTCM homepage
RTK: "Real Time Kinematic"; a differential GNSS positioning technique that provices 1-10 mm accuracy using real-time data
S
SAR: "Synthetic Apeture Radar"; see more at SAR satellites for Earth-orbiting SAR missions
SBAS: "Satellite Based Agmentation System"; the component of a set of geostationary satellites (one orbital plane at 0° inclination, approximately 35786 km above mean sea level at the equator, with an orbital period of 23h 56m 04.1s, or 1 orbit every sidereal day) to augment GNSS use for civilian applications using code division multiple access with a right-hand circularly polarized carrier frequencies at L1 = 1575.42 MHz and (for some SVs) L5 = 1176.45 MHz; the operational and proposed satellites of PRN 120 to 142 include:
- EGNOS (European Geostationary Navigation Overlay Service) — a joint project of the European Space Agency (ESA), the European Commission (EC) and Eurocontrol, the European Organisation for the Safety of Air Navigation for the European area; EGNOS OS SDD (Ver. 3.0, 12 Nov 2024)
- GAGAN (GPS And GEO Augmented Navigation) — India
- MSAS (MTSAT-Based Augmentation System) — Japan MTSAT (Multi-functional Transport Satellite)
- SDCM (System for Differential Correction and Monitoring) — Russia; SDCM ICD (Ed. 1, 2012)
- SNAS (Satellite Navigation and Augmentation Service) — China
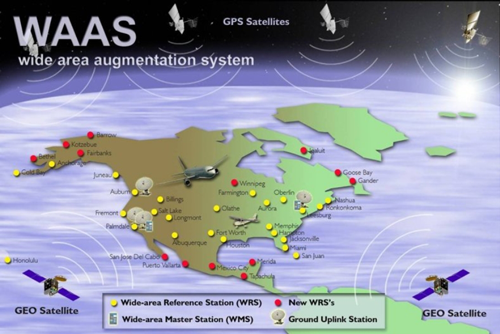
- WAAS (Wide-Area Augmentation System) — USA, for the USA and Canadian area; WAAS Performance Standard (1st Ed., 31 Oct 2008)
where the current operational or proposed satellites are (ordered by PRN):
| Satellite | Longitude | PRN | Region | Signals |
|---|---|---|---|---|
| Inmarsat 3 F2, AOR-E | 15.5°W | PRN 120 | EGNOS | L1 |
| Astra 5B | 31.5°E | PRN 123 | EGNOS | L1 & L5 |
| ESA Artemis | 21.5°E | PRN 124 | EGNOS | L1 |
| Luch-5B | 16.0°W | PRN 125 | SDCM | L1 |
| Inmarsat 4 F2 | 25.0°E | PRN 126 | EGNOS | L1 |
| GSAT-8 | 55.0°E | PRN 127 | GAGAN | L1 & L5 |
| GSAT-10 | 83.0°E | PRN 128 | GAGAN | L1 & L5 |
| MTSAT-1R | 140.0°E | PRN 129 | MSAS | L1 |
| Inmarsat 4 F3 | 98.0 | PRN 133 | WAAS | L1 & L5 |
| PanAmSat Galaxy XV | 133.0°W | PRN 135 | WAAS | L1 & L5 |
| Sirius-5 SES-5 | 5.0°E | PRN 136 | EGNOS | L1 & L5 |
| MTSAT-2 | 145.0°E | PRN 137 | MSAS | L1 |
| Telesat Anik F1R | 107.3°W | PRN 138 | WAAS | L1 & L5 |
| Luch-5V | 95.0°E | PRN 140 | SDCM | L1 |
| Luch-5A | 167.0°E | PRN 141 | SDCM | L1 |
see also:
- IGS MGEX SBAS Status
- SX Blue GPS: SBAS Made Easy, and SBAS Coverage Map
- Wikipedia: Satellite Based Augmentation System
{kind=link}
SCEC: "Southern California Earthquake Center"; see also SCIGN and SCEC homepages
SCIGN: "Southern California Integrated GPS Network"; see also SCIGN homepage
semi-continuous site: a site with a continuous station that has significant data gaps by design, for example so that the equipment can be moved to another similar site
semi-continuous site data: data from one or more semi-continuous sites
session: see receiver session
setting: monument setting
setup: (not necessarily limited to): the antenna dome (if any), the antenna, antenna's LNA (low-noise amplifier), the choke ring (if any), tripod or other antenna support, antenna cable, in-line surge suppressor (if any), receiver, receiver firmware, (and any other item in the signal path) established around a monument for the purpose of collecting GNSS data; modification of anything (see the above items, or a change in antenna height) that could effect positioning results constitutes a new setup (see also station, visit)
sidereal day: time for a body to rotate 360° on its axis relative to the fixed stars; for example, the Earth's sidereal day is 23h 56m 4.098904s, based on the WGS-84 angular velocity of Earth == 7.2921151467e-5 radians/second
sidereal period: time for an orbiting body to make a full orbit relative to fixed stars, and is the orbital period in an inertial frame of reference; for example, the sidereal period of the Moon about the Earth is 27d 7h 43m 11.5s thus defining a sidereal lunar month and the sidereal period of a Navstar GPS SV about the Earth is 11h 58m 2s; compare with draconitic period
signal: both the analog and binary components of the electromagnetic radiation emitted by either the Navstar GPS, GLONASS, Beidou/Compass, Galileo, QZSS IRNSS or SBAS space segments; signals are centered at one or more GHz microwave carrier frequencies
SINEX: "Solution Independent Exchange": see specifications for 2.00 (24 May 2002), 2.01 (24 Mar 2005), and 2.02 (1 Dec 2006) at IERS SINEX format
site: the general, immediate area around one or more monuments or where one or more monuments may be installed; a site is the top layer in a hierarchy (after monument installation):
- a site has one or more monuments,
- a monument has zero or more markers,
- a marker has one or more survey points.
if a physical marker is not part of a particular monument, that monument still must have at least one identifiable survey point. The equipment to collect GNSS data at a particular survey point is either a setup or a station
site description: the general description of a site, primarily to identify how to find the site from surrounding towns, roads, landmarks, etc.
sitelog: an official log for a site; in particular, several agencies or groups have developed specific formats for such logs, such as IGS sitelogs for GPS/GNSS permanent stations; see also IGS-style sitelogs for GPS/GNSS permanent stations with data archived at UNAVCO
SLR: "Satellite Laser Ranging"; a geodetic technique measuring the round-trip time-of-flight of a short-pulse laser between a ground site and a satellite, together with data correction information such as atmospheric effects, which are to be applied to the data, thus allowing a determination of the round-trip distance or range between the site and the satellite; SLR is one of the components used to constrain the scale of the International Terrestrial Reference Frame
smtp: "simple mail transfer protocol"; normal email transfer protocol
SNR: "Signal-to-Noise Ratio"; the ratio of a GNSS signal to noise at the same frequency; modern receivers log the SNR in units of dB-Hz
SOPAC: "Scripps Orbit and Permanent Array Center" of the Scripps Institution of Oceanography, University of California of San Deigo; see also SOPAC homepage
SP3: "Standard Product 3" Orbit Format for GPS (also now known as SP3-a, and later extended with SP3-b and SP3-c), an ASCII exchange format for representing GPS satellite orbits; see also
SP3-b: "Standard Product 3" Orbit Format for GPS and GLONASS, an ASCII exchange format for representing GPS and GLONASS satellite orbits
SP3-c: Extended "Standard Product 3" precise orbit ASCII format for GPS, GLONASS, Galileo, Beidou/Compass, QZSS, IRNSS, and LEO satellite orbits; see also
- Extended Standard Product 3 Orbit Format (SP3-c) (17 Aug 2010)
- IGSMail-5008 (7 Sep 2004) Some information on the error codes given in the SP3-c
SP3-c files can be found at:
station:
a long-term setup; antenna support is usually more permanent than just
a tripod; a station probably includes the setup plus power,
communication, and/or other infrastructure
Setup and station imply two ends of the time spectrum:
a setup is generally more short-term (on the order of hours to days) and a
station is more long-term (on the order of months to years). On
occasion, a setup (plus long-term power) is pushed into long-term
use (many months), but it still does not have the permanence and
survivability implied by the term "station"
survey point: a precisely definable location (down to millimeter or sub-millimeter levels) to which an antenna is located for the purpose of receiving GNSS signals; this may be a physical point such a dimple or cross-hair intersection (i.e. the mark) on a marker, or may a virtual (non-physical) point (see also mark, marker, monument, site)
survey mark: the physical mark for a survey point
SV: "Space Vehicle", referring originally to a specific Navstar GPS satellite, but now used to refer to any one of the Navstar GPS, GLONASS, Beidou/Compass, Galileo, QZSS, IRNSS, or SBAS satellites
SV azimuth: "Space Vehicle" azimuth; angle of view to a specific SV about the local topocentric vertical referenced from a specific fixed direction, usually clockwise from local north
SV elevation: "Space Vehicle" elevation; angle of view to a specific SV above the local topocentric horizon plane
T
TEC: "total electron count" of the ionosphere, which dominates the ionospheric refraction
teqc: "translate, edit, and quality check" software, a UNAVCO data/metadata toolkit; see also teqc homepage
TIA: "Temps Atomique International" or "International Atomic Time", based on the weighted average of a large number of atomic clocks, where since 1967 the second is defined as the period of time equal to 9192631770 cycles of the radiation corresponding to the transition between the two hyperfine energy levels of the ground state of the cesium-133 atom (Cs-133); available since 1955, but TIA was defined as being equal UT1 at the epoch 1.0 Jan 1958
TLALOCNet: "Trans-boundary, Land and Atmosphere Long-term Observational and Collaborative Network"; network of GNSS stations in Mexico; see TLALOCNet at UNAVCO
TLS: "Terrestrial Laser Scanning"; a lidar system installed on the ground (usually on a tripod or other ground-fixed platform) that scans ground targets in a swath azimuthally from the system; see TLS Instrumentation
Transit: full name of Navy Navigation Satellite System (NNSS) Transit, this was the immediate predecessor of the Navstar GPS system; a specific spaceborne radionavigation system financed and operated by the U.S. Department of Defense consisting of 6-10 satellites (3-5 providing navigation service and 3-5 acting as in-orbit spares) in near-circular LEO polar orbits approximately 1075 km above the Earth (orbital period of 1h 46m, or about 27 orbits every 2 sidereal days) transmitting phase modulated navigation signals at 0.150 and 0.400 GHz; any signals after 31 Dec 1996 should not be used for timing or position; used WGS-72 until 27 Jan 1989 as its ECEF spatial coordinate system, whereupon this was switched to WGS-84
U
UNAVCO: originally "University Navstar Consortium" up until 30 Sept 2003, but after which UNAVCO is just a name (i.e. not an acronym) representing the non-profit membership-governed organization that supports and promotes Earth science by advancing high-precision geodetic and strain techniques and technologies such as the Global Positioning System; see also UNAVCO About Us.
UNIX epoch: time base for UNIX operating systems, based on the number on non-leap seconds since 1.0 Jan 1970 UTC; many current systems store the UNIX time internally as a 4-byte 2's complement integer, so that the maximum number of seconds that can be dealt with is 2^31 - 1 = 2147483647, equivalent to 2038 Jan 19 03:14:07 -- though any potential problem with this end date will probably be dealt with long before it's reached (probably by switching to a 8-byte 2's complement integer)
Universal Time: see definitions for the various realizations: UT0, UT1, UT2, and UTC
UT0: Universal Time base defined as precise solar time at the zero meridian (Greenwich)
UT1: UT0 corrected for the Earth's polar motion
UT2: UT1 corrected for seasonal variations in the Earth's rotation rate
UTC: not an acronym, but "Coordinated Universal Time", a hydrid time scale defined where the rate of UTC is based on atomic frequency standards (currently using TIA) but the epoch of UTC is synchronized to be within ±0.9 sec of UT1; this synchronization was defined as UTC = TIA - 10 seconds on 1.0 Jan 1972, and further synchronized since then by the insertion of leap seconds; some of the various realizations of UTC being:
- UTC(USNO) — U.S. Naval Observatory (Washington D.C., USA)
- UTC(GPS) — GPS time automatically steered to UTC(USNO) on a daily basis to keep system time within ±1 microsecond of UTC(USNO)
- UTC(NIST) — National Institute of Standards and Technology (Boulder, Colorado, USA)
- UTC(NPL) — National Physical Laboratory (Middlesex, UK)
- UTC(PTB) — Physikalisch-Technische Bundesanstalt (Braunschweig, Germany)
- UTC(BIPM) — Bureau International des Poids et Mesures (Sèvres, France)
- UTC(SU) — FSUE, East-Siberian Branch, Time and Frequency Division No. 10 (Vniiftri, Russia)
- UTC(NTSC) — National Time Service Center (NTSC), Chinese Academy of Sciences (Beijing, China)
- UTC(NICT) — National Institute of Information and Communications Technology (Koganei/Tokyo, Japan)
and see listings of the delta between standardized UTC and various realizations
V
Vienna mapping functions: a global grid of wet and hydrostatic delays in the troposphere of GNSS carrier waves plus a mapping function that describes the delays as a function of elevation angle of each SV relative to the GNSS receiver; see also Vienna Mapping Functions in VLBI Analyses, J. Boehm & H. Schuh, IVS 2004 General Meeting Proceedings, p. 277-281, 2004
visit: also site visit; establishing a setup/station at a monument for the purpose of collecting data; the UNAVCO Data Group maintains a GPS site visit form to be filled out for each visit, the information on which corresponds to the visit table in the Archive Database; if something about a setup changes during data collection (for example a change of receiver, receiver firmware, antenna, antenna height, etc.), the earlier visit ends and a new visit begins at the time of the change (see also inspection, occupation)
visit code: a non-unique, case-insensitive, 4-character alphanumeric string to identify a specific survey point on a specific monument, e.g. "PEAK" = "peak"; also known as the 4-character ID of a survey point of a monument, usually the same as the monument code, obtained from the survey log — monument visit logsheet, monument record logsheet, or something similar
visit ID: for the purposes of the UNAVCO Archive, a unique number specifying a specific visit
VLBI: "Very Long Baseline Interferometry"; a geometric technique measuring the time difference between the arrival at two Earth-based antennas of a radio wavefront emitted by a distant quasar; the difference in the arrival times between antennas yields a determination of the distance between the antennas and thus the precise positions of the antennas themselves; VLBI is one of the components used to constrain the scale of the International Terrestrial Reference Frame
VPN: "Virtual Private Network"; allows secure access to a private network from public networks over the Internet; connections are secured through the use of dedicated connections, virtual tunneling protocols and encryption; allows users to access services typically only available to users on the local network
W
web service: a software method of communications to support interoperable machine-to-machine interaction over a digital network; see Web Services access to various data and metadata at UNAVCO
WGS-72: "World Geodetic System 1972"; the spatial coordinate system used by GPS through 21 Jan 1987 (see also WGS-84) Some of the major constants in WGS-72, which models the Earth as an ellipsoid of revolution, are:
- semimajor axis (origin to equator on x-y plane) = 6378.135 km
- semiminor axis (origin to either pole) = 6356.7505 km
- flattening = 1/298.26
- angular velocity of Earth = 7.292115147e-5 radians/s
- G x mass of Earth = 3.986008e14 m**3/s**2
WGS-84: "World Geodetic System 1984"; the ECEF spatial coordinate system used by GPS since 22 Jan 1987 (see, for example, "Session 2: World Geodetic System 1984" pp. 67-134, in Proceedings of the Fourth International Geodetic Symposium on Satellite Positioning, Apr. 28 - May 2, 1986, Volume 1); defined in the IS-GPS-200 as:
- origin is the center of mass of the Earth
- z-axis is parallel to the direction of the Conventional International Origin (CIO) as defined by the Bureau International de'l Heure (BIH), and passes through instantaneous pole of epoch 1984.0
- x-axis is the intersection of the reference meridian plane and the plane of the mean astronomic equator, with the reference meridian being parallel to the zero meridian defined by the BIH
- y-axis completes the system as a right-handed rectangular system
Some of the major constants in WGS-84, which models the Earth as an ellipsoid of revolution, are:
- semimajor axis (origin to equator on x-y plane) = 6378.137 km
- semiminor axis (origin to either pole) = 6356.7523142 km
- flattening = 1/298.257223563
- angular velocity of Earth = 7.2921150e-5 radians/s
- angular velocity of Earth (untruncated) = 7.2921151467e-5 radians/s
(for precise satellite applications) - G x mass of Earth = 3.986004418e14 m**3/s**2
- speed of light in vacuum = 2.99792458e8 m/s
X
X or X-coordinate: the cartesian X value in a global right-handed geodetic reference frame along the axis from the origin, usually the center of mass of the Earth, to 0°N 0°E
Y
Y or Y-coordinate: the cartesian Y value in a global right-handed geodetic reference frame along the axis from the origin, usually the center of mass of the Earth, to 0°N 90°E
Z
Z or Z-coordinate: the cartesian Z value in a global right-handed geodetic reference frame along the axis from the origin, usually the center of mass of the Earth, to 90°N 0°E
Last modified: 2025-01-31 18:04:51 America/Denver